[Computer Vision] Image Filtering - Gaussian filter
🧑🏻💻 Topic 정리
- image filtering
- Gaussian Filter
Gaussian Filter
지난 시간에,
filter의 종류에 따라 input image의 선명도나 밝기에 차이를 주고 output image를 뽑아낼 수 있음을 말했습니다.
이번 시간에는 많이 사용되는 Gaussian Filter에 대해 알아보겠습니다.
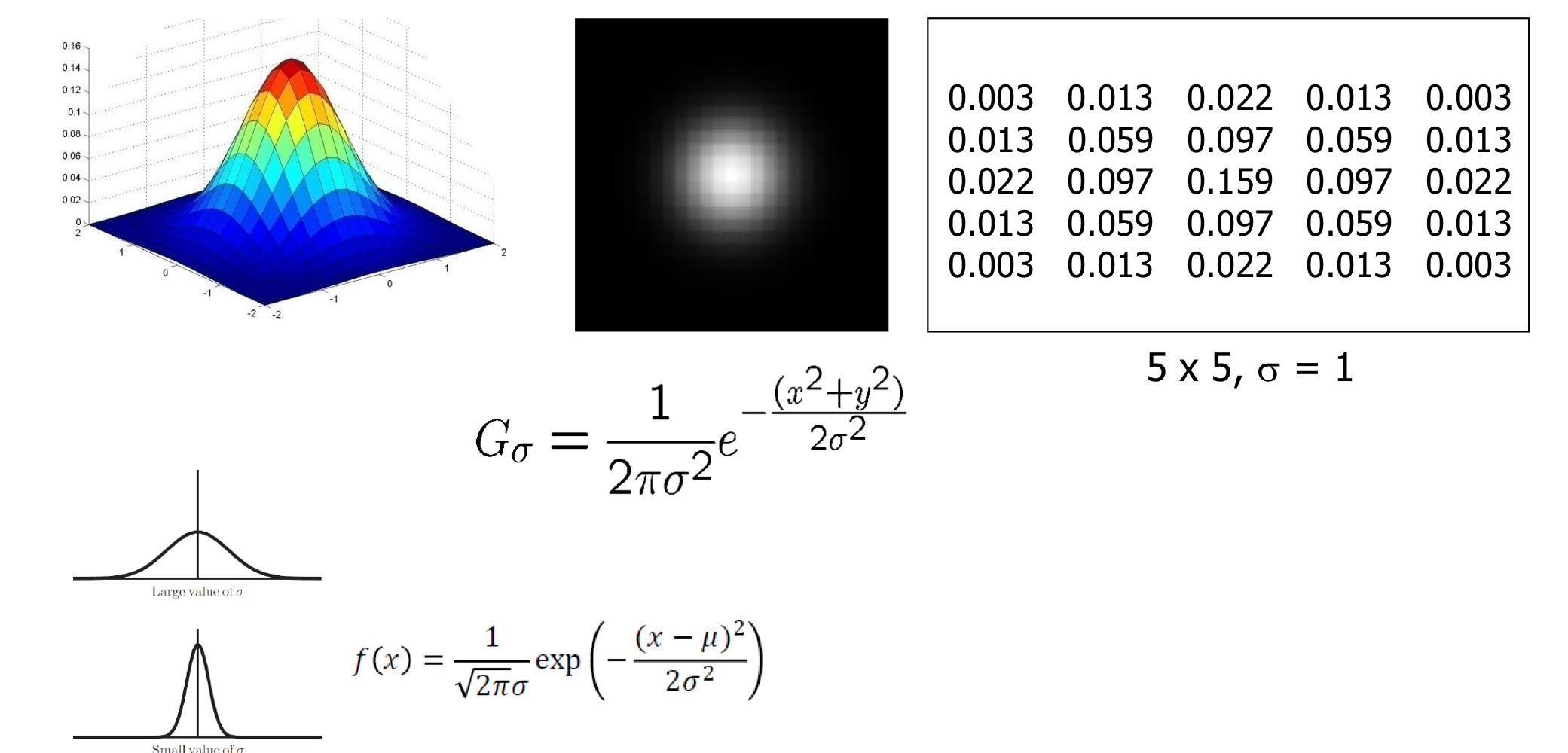
위와 같이 Gaussian Filter가 존재합니다.
수식과 5 x 5의 filter가 있습니다.
우리가 이것을 왜 사용할까요?
image를 smoothing하는 것이 가장 큰 목적입니다.
단순 평균은 아니고, 가중치가 적절히 들어간 평균을 의미합니다.
위 수식에서 보자면,

여기서 평균인 뮤는 0으로 합니다.
그리고 시그마에 따라 내부 값 또한 달라집니다.
그리고 계산해주면,

위 수식이 추가됩니다.
즉, x와 y에 대한 값이 추가된 것입니다.
아래의 수식에 의해서 더해진 것입니다.
그리고,

으로 보면, 시그마가 작을 수록, linear filter와 같이, sharpening filter와 같은 효과가 나타나고,
시그마의 크기가 클 수록, 더 filtering 시의 값 간의 차이가 크지 않기 때문에 더 bluring 되는 효과가 나타납니다.
filter의 크기는 아무리 커봤자 실제로 사용하는 것은 20 x 20 정도입니다.
제한된 크기의 filter 크기입니다.
그래서, 아무리 다 더해도

sum이 1이 되지 않습니다.
그러므로 smoothing인 목적인 우리에게 선명도 이외에도 밝기에도 영향을 끼칩니다.
그러므로 우리는 대책이 필요합니다.
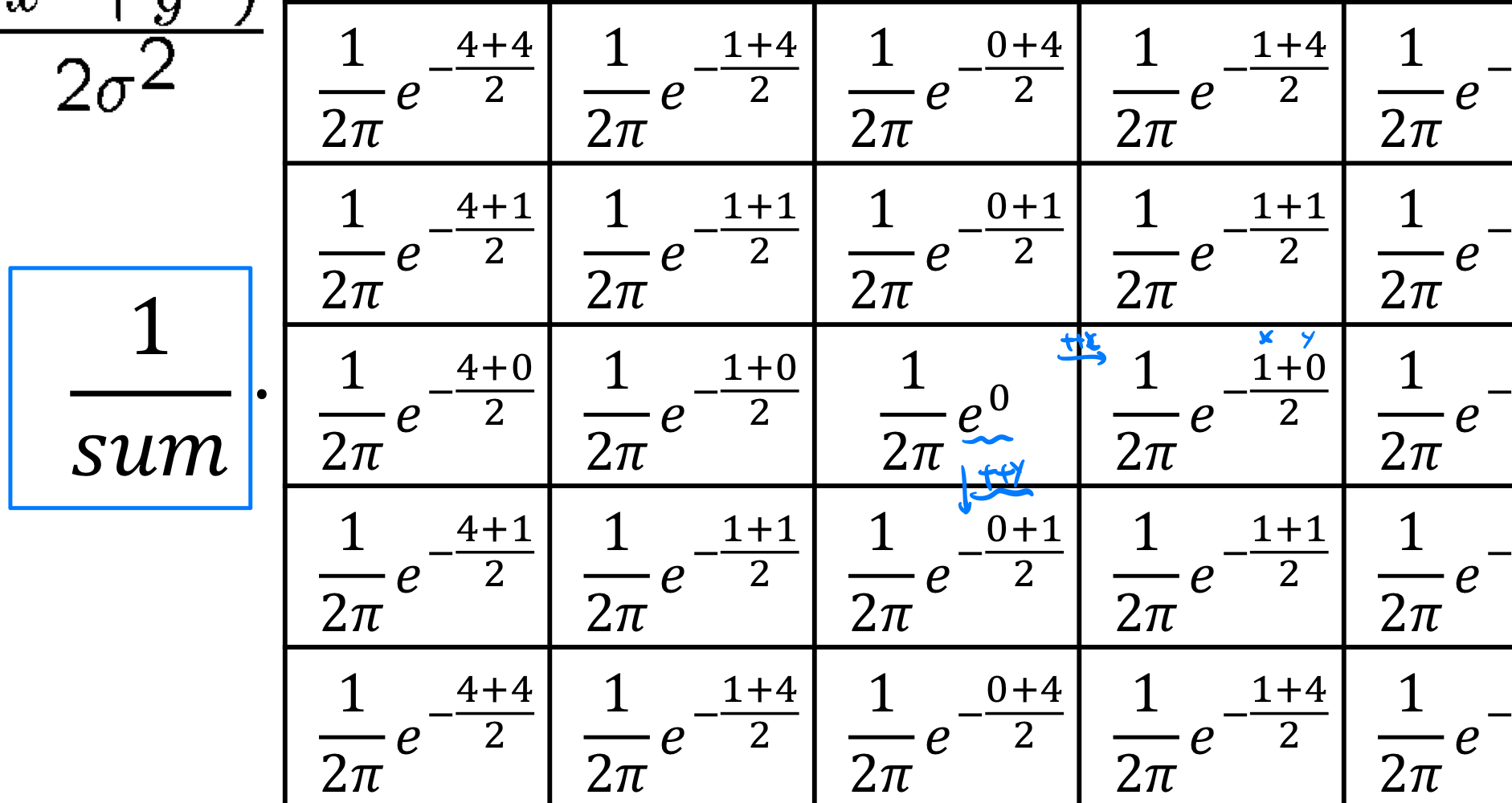
위 그림과 같은 5 x 5의 matrix에서 전체 개수로 나누는 것이 아닌 이 값들의 모든 sum으로 나누어야 밝기에 영향을 주지 않을 수 있습니다.
그리고 중앙에서부터 멀어질 수록 값이 작아집니다.
이 Gaussian filter로 Smoothing 하면 average filter 보다 훨씬 더 부드러운 smoothing을 할 수 있습니다.
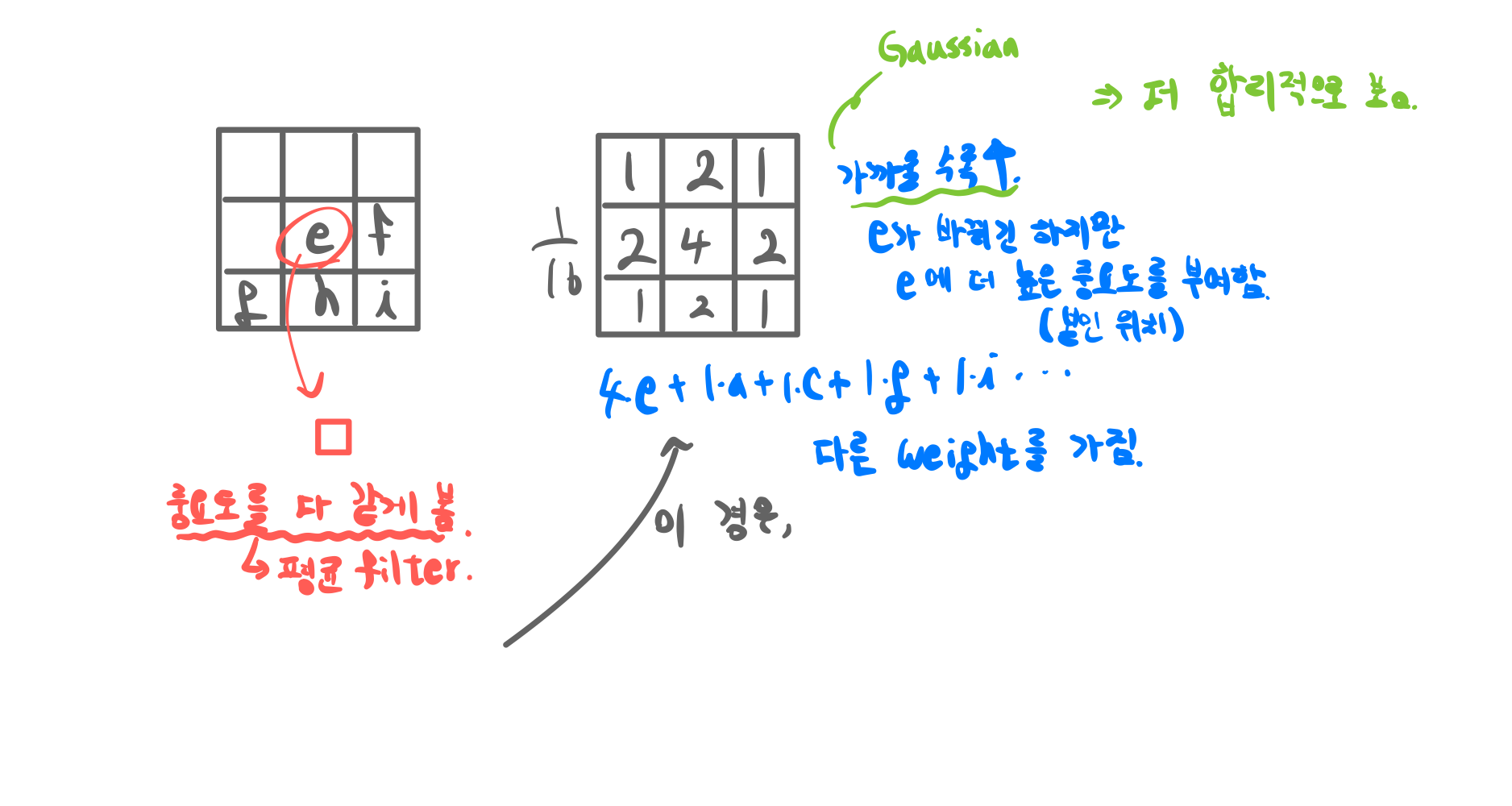
Box filter로 진행하면, Gaussian filter 보다 검은색 부분이 더 보이게 됩니다.
자, 그럼 정리해봅시다.
- Remove "high-frequency" components from the image (low-pass filter)
- images become more smooth
- Separable kernel
- Factors into product of two 1D Gaussians
위 내용와 같이,
image의 high-frequency를 줄임으로써 더 smoothing을 극대화합니다.
- How big should the filter be?
- Sum of elements in filter should be 1
- Value at edges should be near zero
- Rule of thumb for Gaussian : set filter half-width to about 3 ∂
즉, filter의 경계 부분, edges 부분은 0과 가까운 값이어야하고 filter 값의 합은 1이어야합니다.
그리고, ∂는 3 ∂ 정도로 설정합니다.

∂가 작으면, filter 크기가 작으면 Gaussian filter와 average filter 둘 사이의 차이가 거의 없어서, filter 작게 잡을 필요가 있습니다.
그런데, ∂가 크면, filter 크기가 크고 작은 것에 대해서, 11 x 11과 5 x 5는 차이가 거의 없습니다.
그럼에도 불구하고, 11 x 11 은 5 x 5 보다 훨씬 많은 cost가 듦으로,
그래서 우리는 5 x 5 사용을 지향해야하는 부분이 있습니다.
∂가 너무 작으면 smoothing 효과가 거의 없게 됩니다.
filter의 size가 크면, 더 많은 조합이 생겨, smoothing의 효과가 커집니다. 그것에 따라 center 값의 영향력이 작아집니다.
Separability of the Gaussian filter
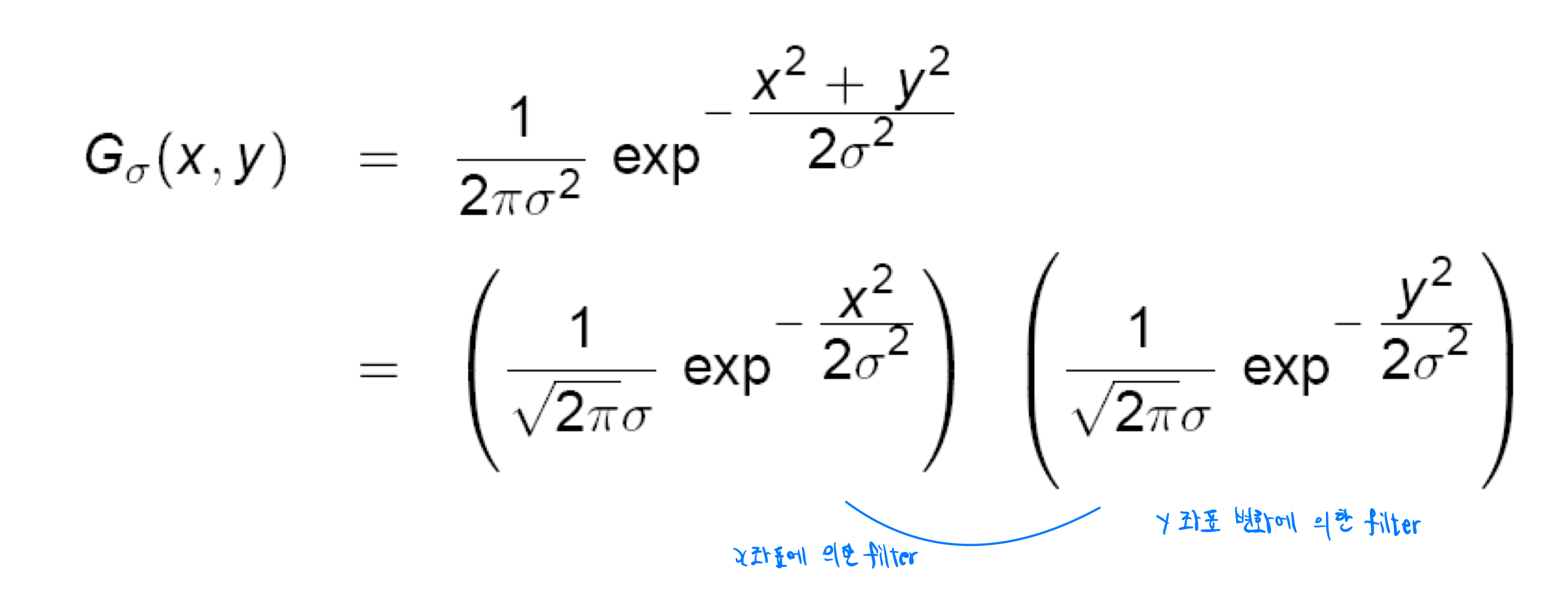
위와 같이 2D Gaussian 은 두 가지 function의 곱으로 표현될 수 있습니다. x에 대한 식과 y에 대한 식입니다.
이 경우, 두 functions은 identically 1D Gaussian입니다.
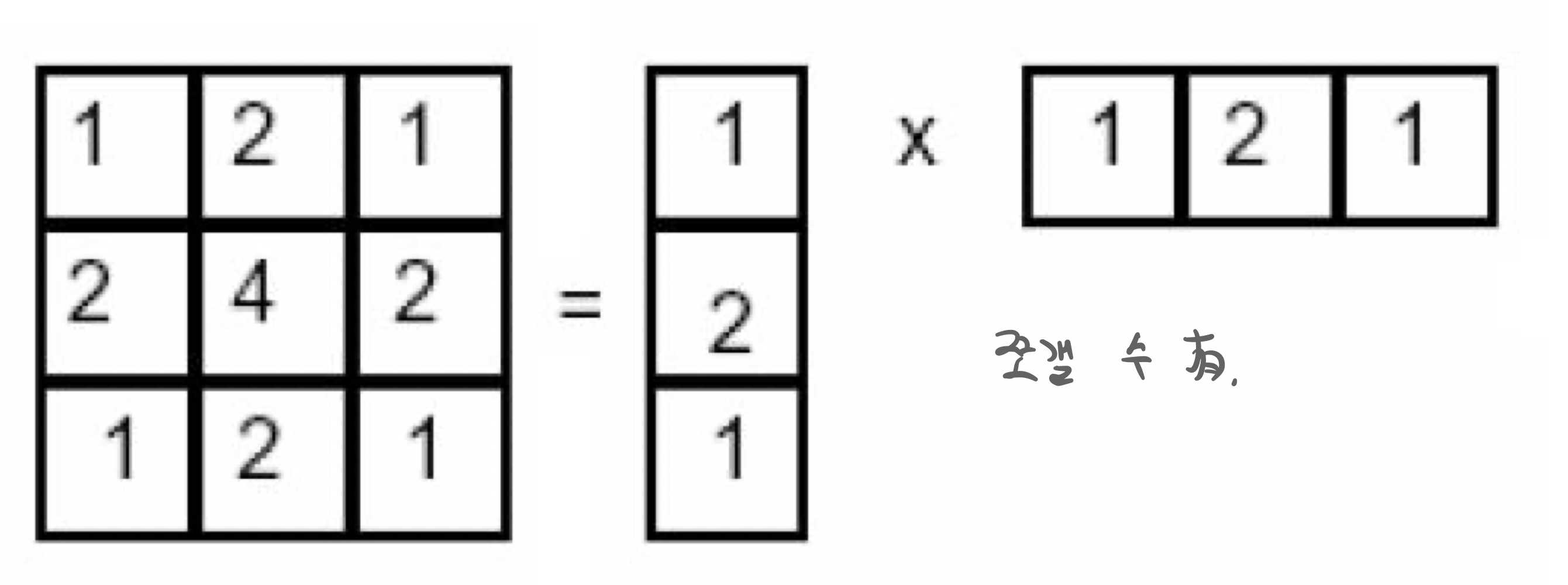
위와 같이 2D Gaussian filter를 1D Gaussian filter 두 개로 나눌 수 있습니다.
filter 크기에 맞는 것끼리 포개어 같은 위치의 값을 곱하여 각각 더할 수 있습니다.
그럼 다음과 같이 두 연산을 비교해보겠습니다.
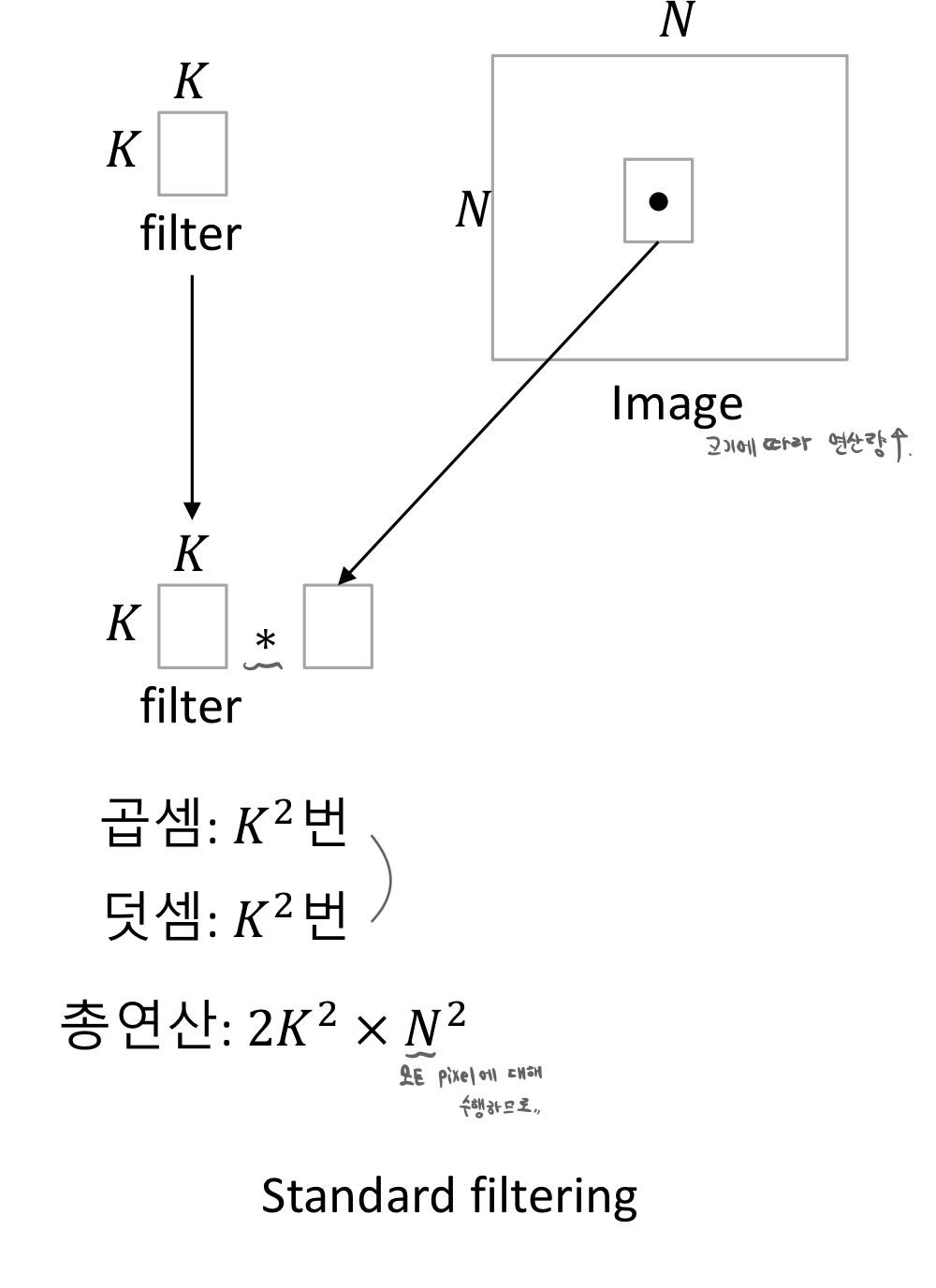
위와 같이 모든 pixel에 대해 수행하여 위와 같이 이루어집니다.

위와 같이 1D Gaussian filter로 연산하였습니다.
이렇게 separability를 통해 연산 측면에서 우위를 가져갈 수 있습니다.
그리고,
Filtering vs. Convolution
2D filtering

2D Convolution

이는 신호연산으로 보인다.
위 두 수식의 차이가 난다.
대칭측면에서만 차이를 보이고 그 외에는 차이가 없다.
'Artificial Intelligence > Computer Vision' 카테고리의 다른 글
| [Computer Vision] Image upsampling (0) | 2023.04.09 |
|---|---|
| [Computer Vision] Image pyramids (0) | 2023.04.05 |
| [Computer Vision] Image Filtering - Average filter (0) | 2023.04.02 |
| [Computer Vision] Pixel-wise Operation - Histogram equalization (0) | 2023.03.25 |
| [Computer Vision] Pixel-wise Operation - Histogram stretching (0) | 2023.03.25 |